|
Deep Online Fused Video Stabilization
Zhenmei Shi* Fuhao Shi^ Wei-Sheng Lai^ Chia-Kai Liang^ Yingyu Liang* University of Wisconsin Madison* Google LLC^ WACV 2022
Abstract
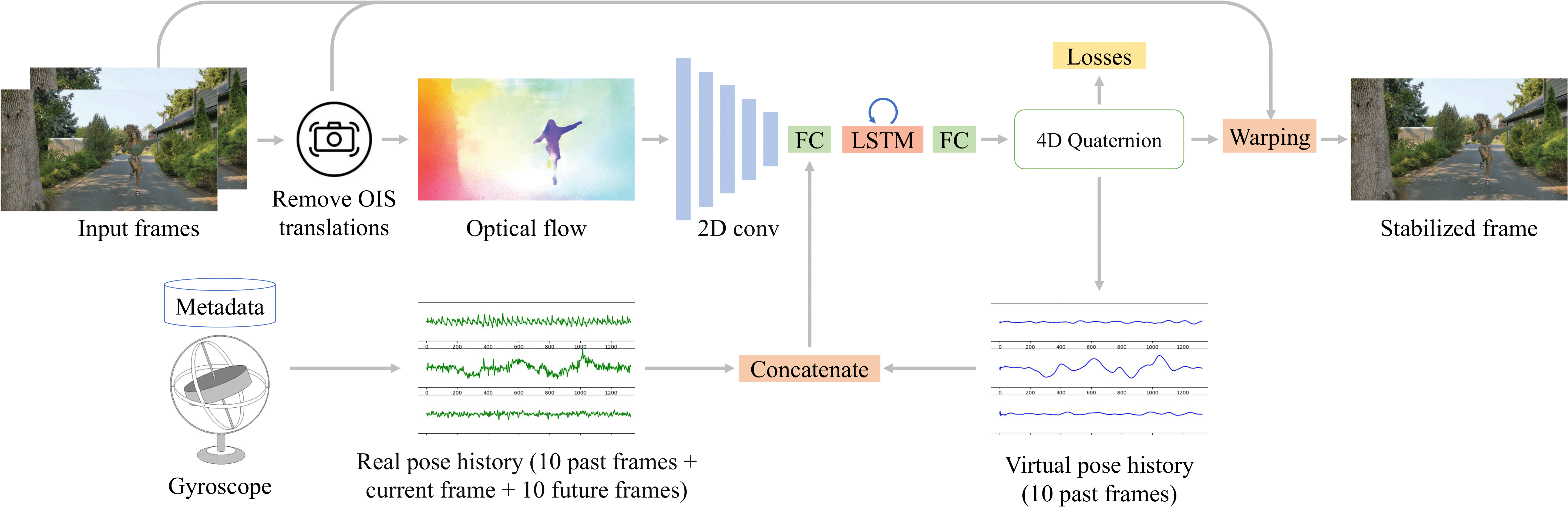
We present a deep neural network (DNN) that uses both sensor data (gyroscope) and image content (optical flow) to stabilize videos through unsupervised learning. The network fuses optical flow with real/virtual camera pose histories into a joint motion representation. Next, the LSTM block infers the new virtual camera pose, and this virtual pose is used to generate a warping grid that stabilizes the frame. Novel relative motion representation as well as a multi-stage training process are presented to optimize our model without any supervision. To the best of our knowledge, this is the first DNN solution that adopts both sensor data and image for stabilization. We validate the proposed framework through ablation studies and demonstrated the proposed method outperforms the state-of-art alternative solutions via quantitative evaluations and a user study.
Video
Downloads
Bibtex
| ||||||||||||||||||||||||